2.1 Introduction
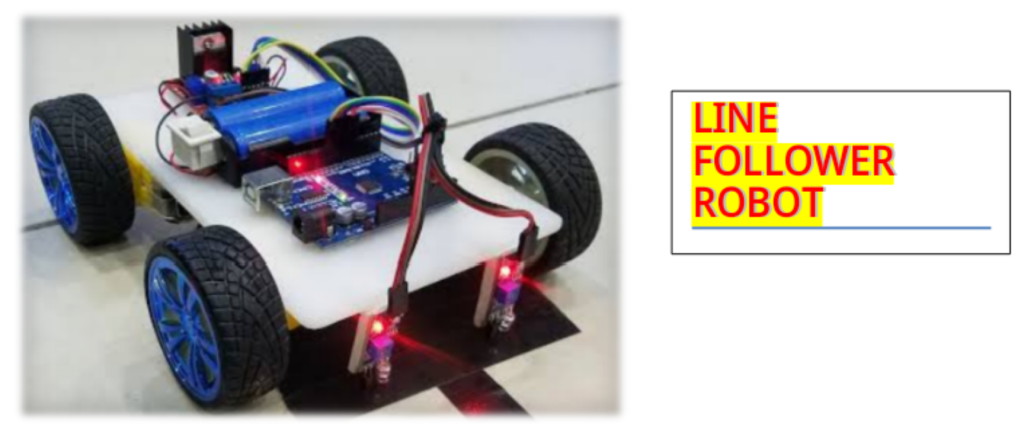
In this project,we will make a 4 wheel line following robot.
Line following robot works on the phenomenon of light.As, we know white colour reflects all of the light falls on it and black colour absorbs the light.In case of line following robot we use IR sensors which have IR transmitter and receiver.Here It transmitter and receiver is used for sending and receiving of light.IR sensor transmits infrared lights.So, when INFRARED RAYS falls on the white on the white surface then it is reflected back to the IR receiver which generates some voltage change and similarly when the rays falls on the black surface then the light is absorbed by the black surface and no rays is received by the IR receiver.
So,when the IR sensor senses white surface then Arduino receives the input as HIGH and when the surface is black then it receives LOW input signals.