3.2 Components Required


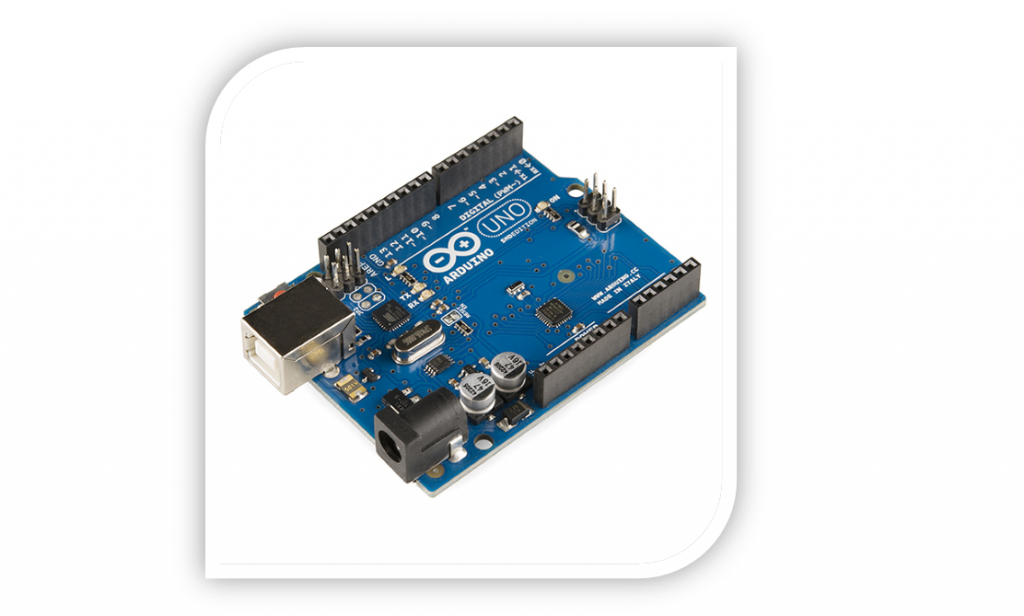
5. Arduino UNO:
Arduino is an open-source electronics platform based on easy-to-use hardware and software. Arduino boards are able to read inputs – light on a sensor, a finger on a button, or a Twitter message – and turn it into an output – activating a motor, turning on an LED, publishing something online. Arduino works like a CPU(Central processing unit), it is a brain of the whole projects.
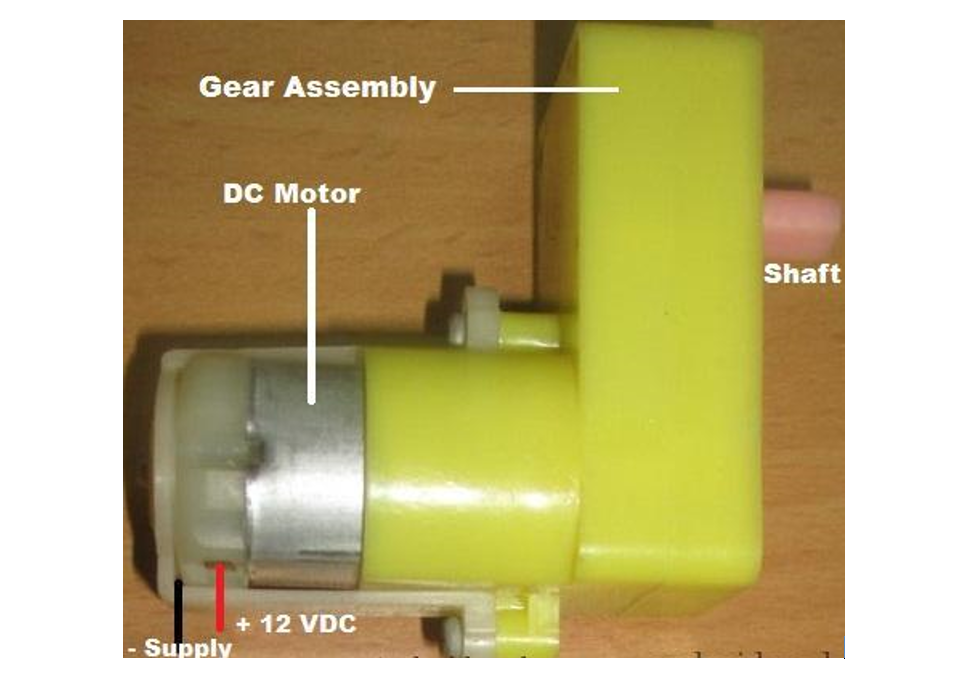
6. Motor driver:
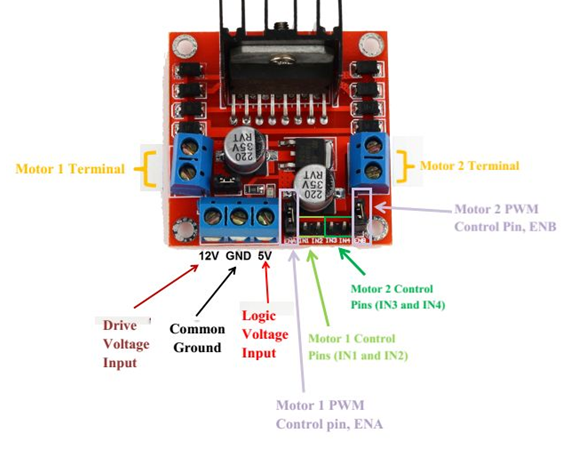
Motor driver is an interface between motor and the control circuit.Motor works on high amount of current but the controller circuit works on low amount of current.So, for this Motor driver are used,they take a low current signal and convert it into high current signals to drive the motors.L293D is a motor driver which drive DC motor in either direction.It means you can control two motors with a motor driver module.
Pin Configuration of Motor driver module:
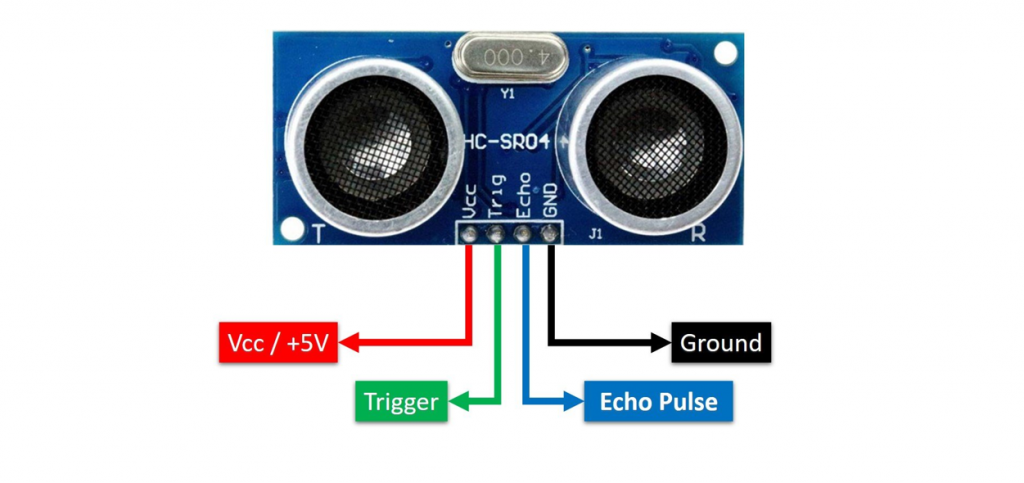
7. Ultrasonic Sensor:
Ultrasonic sensors work by sending out a sound wave at a frequency above the range of human hearing. The transducer of the sensor acts as a microphone to receive and send the ultrasonic sound. Our ultrasonic sensors, like many others, use a single transducer to send a pulse and to receive the echo. The sensor determines the distance to a target by measuring time lapses between the sending and receiving of the ultrasonic pulse.
Pin Configuration of Ultrasonic sensor: