A developer needs to think about the logic for a particular application. In our case of drones, we get the data about the orientation of drone through sensors. We can use these values obtained from sensors to make the drones perform tasks, as the drone is also a machine and programming helps us to instruct it.
In order to understand this, let us look at an example: Auto take off
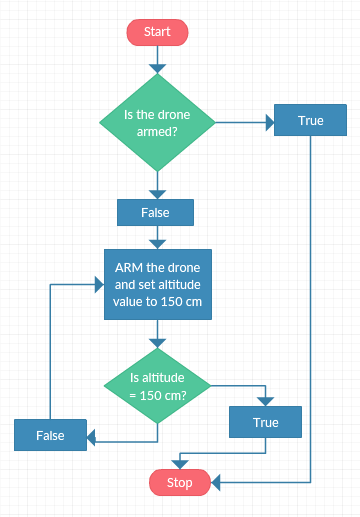
To take off, we need to arm the drone so that the motors and hence the propellers start spinning which would generate the required thrust. During manual take off, we control the amount of thrust to be given to the drone, and try to bring the drone to a suitable height above the ground before we start control it. In many cases, people find this part difficult to control and hence arenu2019t able to fly the drone. To simplify the flying experience, we can add AUTO TAKE OFF feature into a drone.
To add this feature, we need to think about the logic behind it that would enable us to program it. A drone is said to have taken off successfully if it reaches a satisfactory vertical height. Hence, the important aspects of this feature would be to arm the drone and let the drone reach a satisfactory altitude above the ground.
All it takes is to think about proper logic behind the feature you want to add into your drone. Once you have the logic, you can code it as per the syntax of the language and flash it onto your drone.